A significant challenge in AI research is improving the efficiency and accuracy of language models for long-horizon planning problems. Traditional methods either lack the speed needed for real-time applications or the accuracy required for complex tasks. Addressing this challenge is crucial for advancing AI’s practical applications in areas such as robotics, navigation, and other domains requiring robust and flexible planning capabilities. The current limitations in planning efficiency and accuracy hinder the deployment of AI in dynamic, real-world environments.
Existing methods to address long-horizon planning involve two primary approaches: System-1 planners and System-2 planners. System-1 planners generate plans quickly without explicit search but often suffer from inaccuracy, making them unsuitable for complex tasks. System-2 planners, on the other hand, involve deliberate step-by-step planning, which, while accurate, is computationally expensive and too slow for real-time applications. These limitations result in inefficiencies and suboptimal performance, especially when user constraints and goals are not integrated into the planning process.
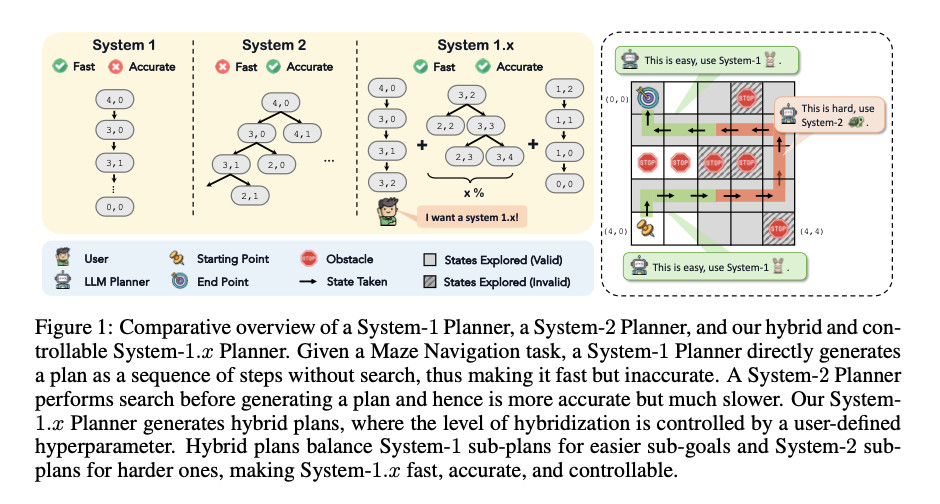
The researchers from UNC Chapel Hill introduces the System-1.x Planner, a novel hybrid planning framework that combines both System-1 and System-2 planning modes. A controller dynamically decomposes planning problems into sub-goals, classifying them as either easy or hard. Easy sub-goals are handled by fast System-1 planners, while hard sub-goals are tackled by more accurate System-2 planners. A user-defined hyperparameter governs this hybridization, allowing controlled allocation of computational resources based on problem difficulty. This approach significantly contributes to the field by balancing speed and accuracy, offering a more efficient and adaptable solution compared to existing methods.
The System-1.x Planner is built on a single base large language model (LLM) fine-tuned for three components: the controller, the System-1 planner, and the System-2 planner. The controller’s role is to decompose the planning task and allocate sub-goals based on their difficulty. Training data for these components is generated using search traces from classical planning tasks, such as Maze Navigation and Blocksworld. The Maze Navigation dataset consists of 3200 training, 400 validation, and 400 test examples, while the Blocksworld dataset includes 3000 training, 250 validation, and 200 test samples. Key metrics include the number of states explored and plan validity, emphasizing the model’s efficiency and accuracy in different planning contexts.
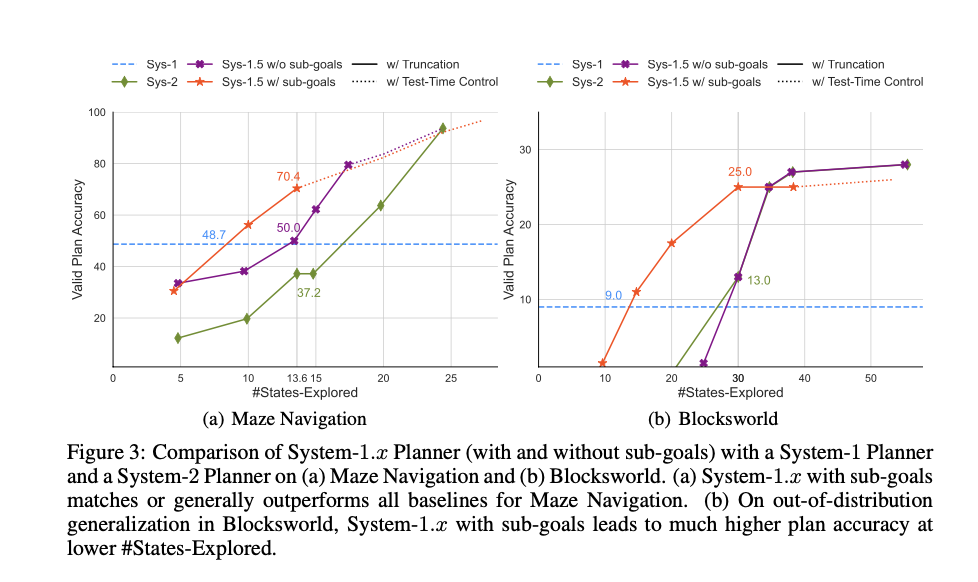
The System-1.x Planner demonstrates superior performance in experiments involving Maze Navigation and Blocksworld tasks. For Maze Navigation, the System-1.x Planner achieved 70.4% accuracy using an average of 13.6 states, significantly outperforming both System-1 and System-2 planners. It also showcased substantial improvements in Blocksworld, managing longer plans more efficiently. The results highlight the System-1.x Planner’s ability to balance speed and accuracy effectively, achieving up to 33% higher accuracy than other planners at a fixed budget of states explored.
In conclusion, the System-1.x Planner, a hybrid framework, effectively balances fast and slow planning modes, addressing key limitations of existing methods. By leveraging a user-defined hybridization factor, the System-1.x Planner adapts to problem difficulty, optimizing for both accuracy and efficiency. This innovative approach advances the field of AI planning by providing a more scalable and flexible solution for real-world applications, overcoming significant challenges in current planning systems.
Check out the Paper and GitHub. All credit for this research goes to the researchers of this project. Also, don’t forget to follow us on Twitter and join our Telegram Channel and LinkedIn Group. If you like our work, you will love our newsletter..
Don’t Forget to join our 47k+ ML SubReddit
Find Upcoming AI Webinars here
Aswin AK is a consulting intern at MarkTechPost. He is pursuing his Dual Degree at the Indian Institute of Technology, Kharagpur. He is passionate about data science and machine learning, bringing a strong academic background and hands-on experience in solving real-life cross-domain challenges.

